
حالت مطالعه


دوره های مرتبط
روش رانگ کوتا در متلب | مرتبه دوم، چهارم همراه با مرتبه 3 و 5
- روش رانگ کوتا در متلب – مرتبه دوم، سوم، چهارم و پنجم
- حل انواع معادلات دیفرانسیل مرتبه اول و مراتب بالاتر در متلب و حل دستگاه معادلات دیفرانسیل
- حل سه مثال معادله مرتبه اول و دوم و دستگاه معادلات برای هر روش
- توضیحات کامل همهی روشهای رانگ کوتا
- کدنویسی ساده، روان و قابل فهم همراه با توضیحات کامل این روش و نکات مورد استفاده از کد
محاسبه انتگرال به روش گاوس لژاندر در متلب | یک تا شش نقطه
- حل عددی انواع انتگرال در بازه دلخواه
- کدنویسی ساده، روان و قابل فهم
- حل 6 مثال تشریحی از روشهای گاوس لژاندر یک نقطهای تا 6 نقطهای
- همراه با توضیحات کامل این روش و نکات مورد استفاده از کد (فایل راهنما)
- قابلیت تغییر تمامی پارامترهای موجود
- دارای پشتیبانی گام98
حل دستگاه معادلات غیرخطی در متلب به روش نیوتن رافسون
- حل انواع دستگاه معادلات غیرخطی
- کدنویسی ساده، روان و قابل فهم
- حل 3 مثال از دستگاه معادلات غیرخطی برای درک بهتر
- همراه با توضیحات کامل این روش و نکات مورد استفاده از کد
- قابلیت تغییر تمامی پارامترهای موجود
- دارای پشتیبانی گام98
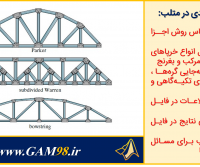
تحلیل خرپا دو بعدی در متلب به روش اجزا محدود (کدنویسی و محیط GUI)
تحلیل خرپای 2 بعدی در متلب
ویژگیها:
تحلیل انواع مختلف خرپاهای دو بعدی معین و نامعین
ارائه شده در دو فرم کدنویسی و رابط گرافیکی
وارد کردن اطلاعات خرپا در فایل اکسل
محاسبه عکسالعمل تکیهگاهی، جابهجایی گرهها و تنش در اعضا
سریع و مناسب برای مسائل بهینهسازی خرپاها
نرمافزار مورد استفاده: Matlab (متلب)
کلیه فایلها تست شده و 100% سالم میباشند.
ضمانت بازگشت وجه درصورت هرگونه مشکل در فایلها
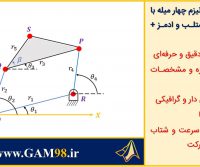
مکانیزم لینک صفحهای با متلب و ادمز | پروژه دینامیک ماشین
- تحلیل دینامیکی انواع مکانیزمهای چهار میله با لینک صفحهای در متلب
- رسم نمودارهای سرعت و شتاب و انیمیشن حرکت مکانیزم
- همراه با فایل راهنما و توضیحات کدنویسی
- کدنویسی ساده، روان و قابل فهم
- قابلیت تغییر تمامی پارامترهای موجود
- دارای پشتیبانی گام98