


دوره های مرتبط

محاسبه انتگرال به روش سیمپسون در متلب | 6 مثال
- محاسبه هر نوع انتگرال به روش سیمپسون در متلب
- کدنویسی ساده، روان و قابل فهم
- حل 6 مثال برای درک بهتر
- همراه با توضیحات کامل این روش و نکات مورد استفاده از کد
- قابلیت تغییر تمامی پارامترهای موجود
- دارای پشتیبانی گام98
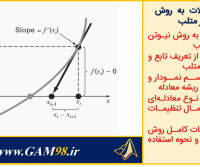
حل معادله به روش نیوتن رافسون در متلب | همراه با توضیحات
- حل انواع معادلات خطی و غیرخطی به روش نیوتن رافسون در متلب
- همراه با جدول حل هر مرحله و رسم نمودار تابع با پاسخ آن
- کدنویسی ساده، روان و قابل فهم
- حل 3 مثال برای درک بهتر
- همراه با توضیحات کامل این روش و نکات مورد استفاده از کد
- قابلیت تغییر تمامی پارامترهای موجود
- دارای پشتیبانی گام98
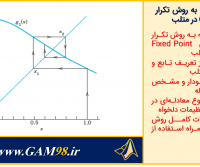
حل معادله به روش تکرار ساده (نقطه ثابت) در متلب
- حل انواع معادلات خطی و غیرخطی به روش تکرار نقطه ثابت در متلب
- همراه با جدول حل هر مرحله و رسم نمودار تابع با پاسخ آن
- کدنویسی ساده، روان و قابل فهم
- حل 3 مثال برای درک بهتر
- همراه با توضیحات کامل این روش و نکات مورد استفاده از کد
- قابلیت تغییر تمامی پارامترهای موجود
- دارای پشتیبانی گام98
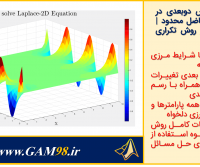
معادله لاپلاس در متلب به روش تفاضل محدود | روش تکرار ژاکوبی
حل معادله لاپلاس دو بعدی در متلب به روش تفاضل محدود با امکان تغییر همه پارامترها و شرایط مرزی
همراه با دو مثال از شرایط مرزی دیریکله و ترکیبی نیومن و دیریکله
حل با استفاده از روش تکراری ژاکوبی
نرمافزار مورد استفاده: Matlab (متلب)
فرمت فایل: m file
کلیه فایلها تست شده و 100% سالم میباشند.
ضمانت بازگشت وجه درصورت هرگونه مشکل در فایلها
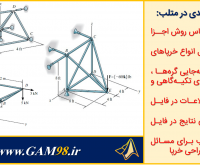
تحلیل خرپا سه بعدی در متلب به روش اجزا محدود (کدنویسی و محیط GUI)
تحلیل خرپای 3 بعدی در متلب
ویژگیها:
تحلیل انواع مختلف خرپاهای دو بعدی معین و نامعین
ارائه شده در دو فرم کدنویسی و رابط گرافیکی
وارد کردن اطلاعات خرپا در فایل اکسل
محاسبه عکسالعمل تکیهگاهی، جابهجایی گرهها و تنش در اعضا
سریع و مناسب برای مسائل بهینهسازی خرپاها
نرمافزار مورد استفاده: Matlab (متلب)
کلیه فایلها تست شده و 100% سالم میباشند.
ضمانت بازگشت وجه درصورت هرگونه مشکل در فایلها
نظرات
169,000 تومان

مجتبی قاسم زاده مقدم
کارشناس ارشد مهندسی مکانیککارشناس ارشد مهندسی مکانیک از دانشگاه خواجه نصیرالدین طوسی، گرایش طراحی کاربردی (زمینه دینامیک و ارتعاشات)